Imagine you’re on vacation. While you’re strolling through a street market in a tropical port, a street vendor offers you a type of fruit that you’ve never seen before. Intrigued, you reach out, grasp the fruit, and bring it up to your nose to experience its aroma.
Nothing could be easier than picking something up, right? But for a robot, calculating how to handle an object they’ve never seen before is incredibly difficult.
Robots can manipulate, grasp, or pick up objects so long as they are uniform, but become confused by the tiniest changes in position, shape, or size. Hard-coding a robot’s movements for every possible scenario is time-consuming, expensive, and will not work unless the robot’s environment is precise and uniform or when objects are deformable (such as fabric).
Dexterity is Holding Robots Back
This lack of robotic dexterity has hampered the development of general-purpose robots that would be able to perform more than one specialized task in industrial settings, such as factories or warehouses, or home settings. But thanks to a crop of high-profile organizations across the world working on the problem and a new approach to machine learning, general-purpose, dextrous robots are closer than ever before.
Researchers are working on improving robots’ adaptability and the speed with which they can learn new tasks. AI start-up Covariant (formerly called Embodied Intelligence) CEO Peter Chen told The Verge in 2017 he expects “all the rote and repetitive tasks in manufacturing and assembly could be performed by general-purpose robots” in the next 10 to 20 years, although the task ahead is still “enormous.” To date, Covariant has achieved 90% reliability with their methods, which is not yet good enough for industrial processes.
Learning by trial-and-error (reinforcement learning) has been seen as a better alternative to hard-coding, although it is still extremely time-consuming and robots continue to be flummoxed by objects they haven’t encountered before.
Covariant has turned away from hard-coding and reinforcement learning to experiment instead with “imitation learning,” where robots learn to copy humans completing a task. The exciting element in imitation learning is that the robot generalizes what they’ve seen and will be able to use these skills in a variety of different scenarios. This accords with the holy grail of AI research: to create generalized, rather than specialized, intelligence.
New Advancements Getting Closer to Dexterous Robotic Future
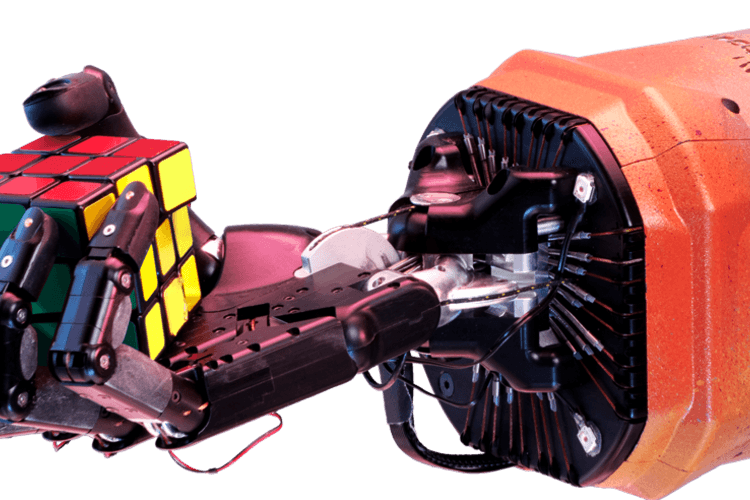
OpenAI, a non-profit founded by Elon Musk, has recently succeeded in teaching a robot hand to manipulate a six-sided cube. The breakthrough occurred when researchers added randomization into the learning simulation, such as making the surface of the virtual cube slippery, changing its size, weight and color, and even the gravity in which the virtual hand operated. The focus was to teach the virtual hand to deal with the unexpected. Crucially, OpenAI achieved this using general-purpose algorithms used to tackle varied tasks.
Organizations working on the problem of robotic dexterity include:
- OpenAI
- Covariant: formerly Embodied Intelligence
- The University of Berkley: working on a dextrous robot for the home named “Blue”
- Amazon: holds a yearly robotic “picking challenge”
- Google: experimenting with hooking robot arms together so they can learn grasping skills from each other
- Kindred: developers of robotics intelligence platform AutoGrasp
- Harvard University and MIT: researchers at both universities have developed a soft robotic gripper that mimics origami to conform to the shape of an object.
In a world full of household and factory objects designed for the human hand, robotic dexterity is the key to the creation of general-purpose robots. In 10 to 20 years, manufacturers investing in robotic workers will no longer ask whether the machine is capable of successfully undertaking a specific task, but will judge their ROI on how many tasks the robot can learn to manage.








![Internet at the Speed of Li-Fi [Flash Forward Fridays]](https://machinerys.net/upload/cache/202507/internet-at-the-speed-of-li-fi-flash-forward-fridays.webp)
![Living on the Edge with Edge Computing [Flash Forward Fridays]](https://machinerys.net/upload/cache/202507/living-on-the-edge-with-edge-computing-flash-forward-fridays.webp)