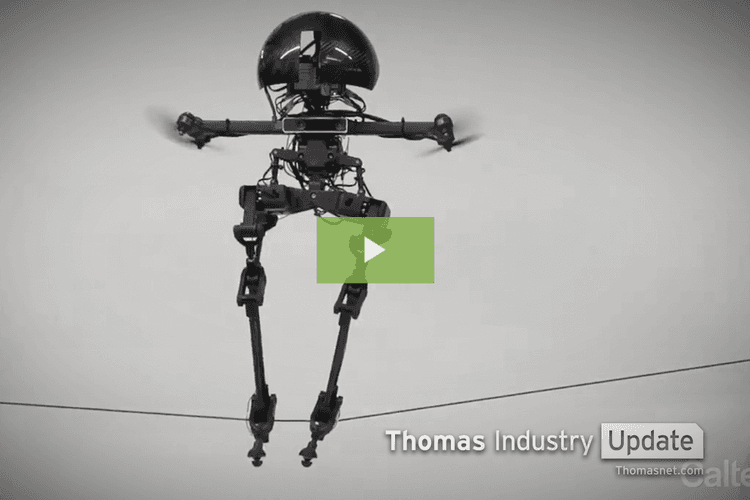
Leonardo, or LEO to its friends, is a bipedal robot that can walk and fly. It kind of walks like the guy who just had two quick ones and is feeling fine — little pep in its step.
Leonardo, which stands for LEgs ONboARD drOne, results from years of work from Caltech researchers from the university’s Center for Autonomous Systems and Technologies (CAST).
Inspired by nature, LEO is an attempt to mimic the way a bird navigates telephone lines by flapping and hopping using a combination of walking and flying. The result looks similar to a human wearing a jetpack. It’s reminiscent of a daintier version of the JetSuit from Gravity Industries.
LEO not only walks like a real cool cat, but it can also walk a slackline like the bird on a wire or ride a skateboard, albeit quite slowly. The idea is for LEO’s multimodal locomotion to serve as the best of both worlds, at least initially in search and rescue efforts. While similar concepts have been developed using aerial drones and bipedal and quadruped robots, they have limitations.
The robot is a mere 2.5 feet tall and has three actuated joints in each leg. Four propeller thrusters are mounted on the robot’s shoulders at an angle. According to the researchers, LEO is the first robot to use multi-joint legs and propeller-based thrusters to achieve balance. For example, the robot’s lightweight legs take stress off its thrusters by supporting the bulk of the weight, but the thrusters are controlled synchronously with leg joints to provide better balance.
LEO can also take a licking and keep on ticking, as evidenced by Caltech’s researchers jabbing it with a stick to see if it will fall over. It’s reminiscent of the footage out of Boston Robotics when the team stress-tested Atlas with a hockey stick. What is it about human curiosity that demands poking something with a stick?
To test its stability, they placed LEO on a whiteboard covered in oil and took a couple of cheap shots at it. It seems silly, but it’s a testament to LEO’s ability to carry out robotic missions that singular locomotion robots couldn’t achieve. As another example of leveraging hybrid locomotion to stand up to the elements, the team put a quadcopter and Leo in front of a fan. While the quadcopter was blown away, Leo used the ground contact to stay in place. It even used its capabilities to ride a skateboard, and, if nothing else, it would have made for a banging TV show in the ’90s.
Next, the team hopes to make LEO’s legs more rigid to support a bigger payload and make the propellers more powerful. They also want to make the robot more autonomous, using deep neural networks to make its own decisions about the best combination of walking, flying, or hybrid motion based on the safest and most efficient movement for the situation.